ECAS2019
Notes for session 3
Adrian Baddeley and Ege Rubak July 15, 2019
Dependence between points
Another important goal is to detect stochastic dependence between points in a point pattern.
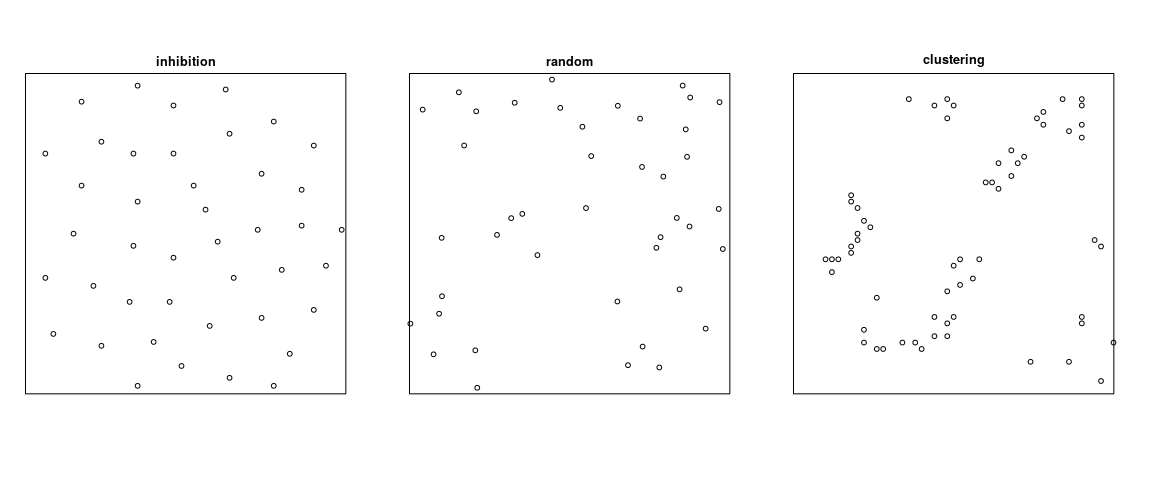
- The homogeneous Poisson process is regarded as completely random (Complete Spatial Randomness, CSR).
- A point process is called inhibited if the distances between points are typically larger than expected for a random pattern with the same intensity.
- A point process is called clustered if the distances between points are typically smaller than would be expected for a random pattern with the same intensity.
The terms inhibited and clustered are analogous, respectively, to “negatively correlated” and “positively correlated”. They do not imply any particular kind of stochastic dependence and they do not explain how the pattern was generated.
Dependence between points is sometimes called “interaction”, but this term is dangerous because it suggests a particular mechanism for the dependence.
Exploratory tools
Traditionally (1976-2005) dependence between points was investigated
using exploratory tools such as Ripley’s
function and the pair
correlation function. While these methods are useful and convenient,
they have limitations. They have become so popular that many user
communities are not interested in learning better methods that have been
developed in recent years. In this workshop, as an experiment we are
reducing the coverage of these methods to a minimum, so that we can
concentrate on the more modern methods.
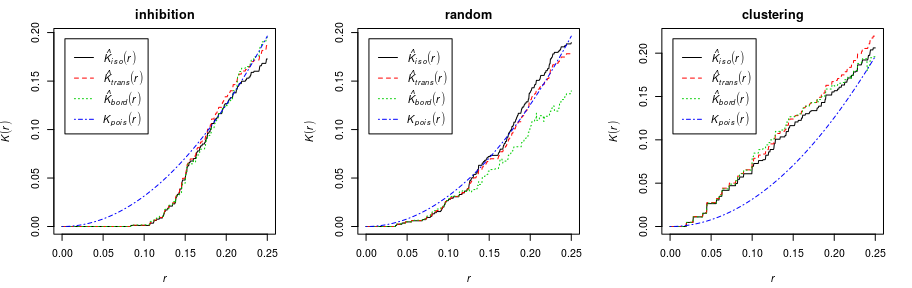
K-function
The (Ripley) -function
assumes the point process has constant intensity
.
It is defined so that, for a typical random point in the point process,
the number of other random points lying closer than a distance
has expected value
.
For a completely random (homogeneous Poisson) process, . An inhibited process will usually have
, while a clustered process will have
, for appropriate values of
.
An estimate of the
function can be computed for a point pattern dataset
X by typing K <-
Kest(X).
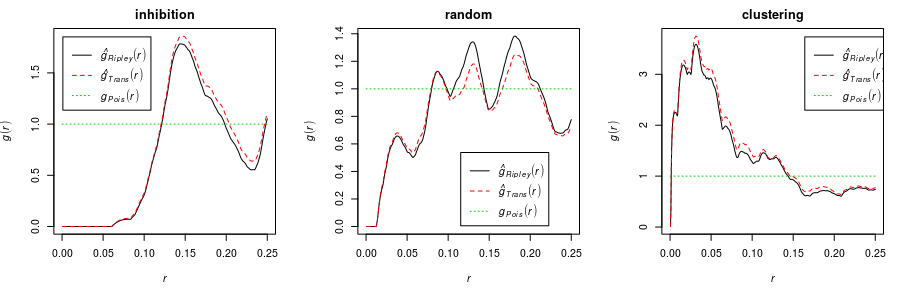
pair correlation function
The pair correlation function
can be
defined as
where
is the derivative of the
function. The pair
correlation function can be interpreted as the probability that two
points in the point process will be separated by a distance equal to
, normalised by the
corresponding probability for a completely random (Poisson) process.
For a completely random (homogeneous Poisson) process, . An inhibited process will usually have
, while a clustered process will have
, for appropriate values of
.
An estimate of the pair correlation function can be computed for a point
pattern dataset X by typing g <- pcf(X).
Explicit Models for clustered data
plot(redwood)
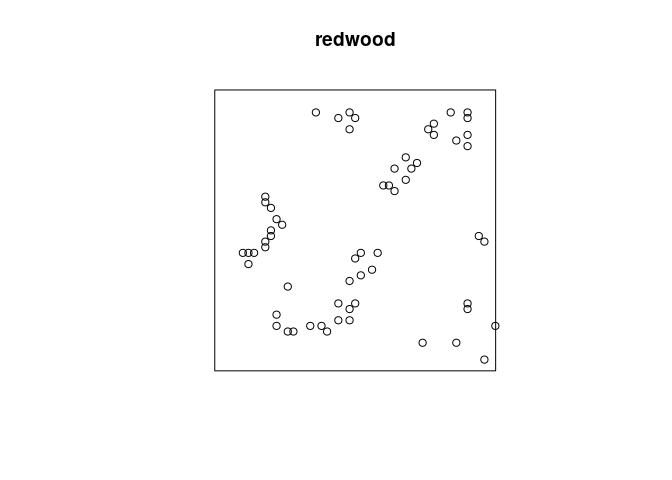
Cluster processes
A cluster process is generated in two stages.
- a point pattern of “parent” points
is generated;
- around each parent point
, a finite pattern of “offspring” points
is generated;
- the offspring of all parents are collected together into a single
point pattern
.
In a Thomas cluster process,
- the parents are a homogeneous Poisson process with intensity
;
- each parent has a Poisson number (with mean
) of offspring, which are displaced from the parent by independent Gaussian vectors with standard deviation
.
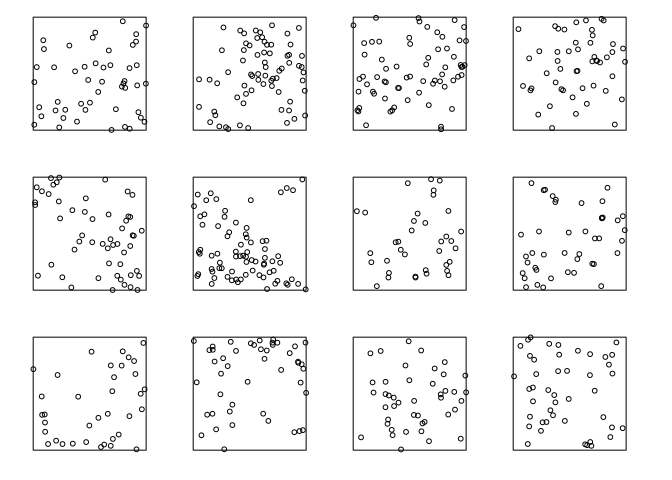
Here are simulated realisations of a Thomas process:
plot(rThomas(kappa=10, sigma=0.2, mu=5, nsim=12),
main="", main.panel="")
Maximum likelihood fitting of cluster processes is difficult because the
likelihood is quite complicated. However, the
-function of such
cluster processes is known analytically, so the model can be fitted by
the method of moments (matching the model’s theoretical
-function to the
empirical
-function of
the data). This is performed by the
spatstat function kppm.
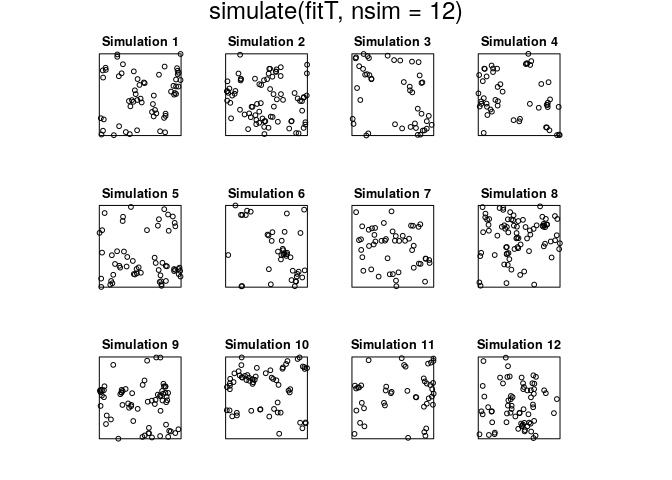
fitT <- kppm(redwood ~ 1, "Thomas")
fitT
## Stationary cluster point process model
## Fitted to point pattern dataset 'redwood'
## Fitted by minimum contrast
## Summary statistic: K-function
##
## Uniform intensity: 62
##
## Cluster model: Thomas process
## Fitted cluster parameters:
## kappa scale
## 23.5511449 0.0470461
## Mean cluster size: 2.632568 points
plot(simulate(fitT, nsim=12))
## Generating 12 simulations... 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12.
## Done.
kppm(redwood ~ x+y, "Thomas")
## Inhomogeneous cluster point process model
## Fitted to point pattern dataset 'redwood'
## Fitted by minimum contrast
## Summary statistic: inhomogeneous K-function
##
## Log intensity: ~x + y
##
## Fitted trend coefficients:
## (Intercept) x y
## 3.95144951 0.29770284 -0.04607577
##
## Cluster model: Thomas process
## Fitted cluster parameters:
## kappa scale
## 22.97116104 0.04625136
## Mean cluster size: [pixel image]
Cox processes
A Cox process is formed in two steps:
- a random function
is generated;
- Given the realisation of the random function, a Poisson point
process is generated with intensity function
In a log-Gaussian Cox process, the random function
is such that
is a Gaussian random function.
These models can be fitted by the same technique:
kppm(redwood ~ x+y, "LGCP")
## Inhomogeneous Cox point process model
## Fitted to point pattern dataset 'redwood'
## Fitted by minimum contrast
## Summary statistic: inhomogeneous K-function
##
## Log intensity: ~x + y
##
## Fitted trend coefficients:
## (Intercept) x y
## 3.95144951 0.29770284 -0.04607577
##
## Cox model: log-Gaussian Cox process
## Covariance model: exponential
## Fitted covariance parameters:
## var scale
## 1.09380346 0.09796466
## Fitted mean of log of random intensity: [pixel image]
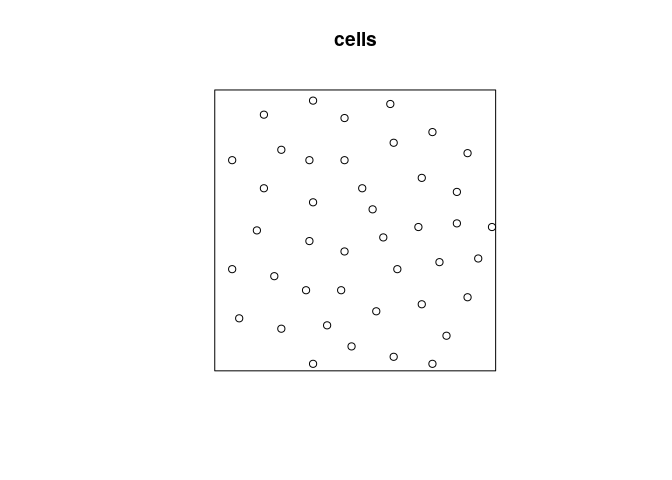
Models for inhibited data
plot(cells)
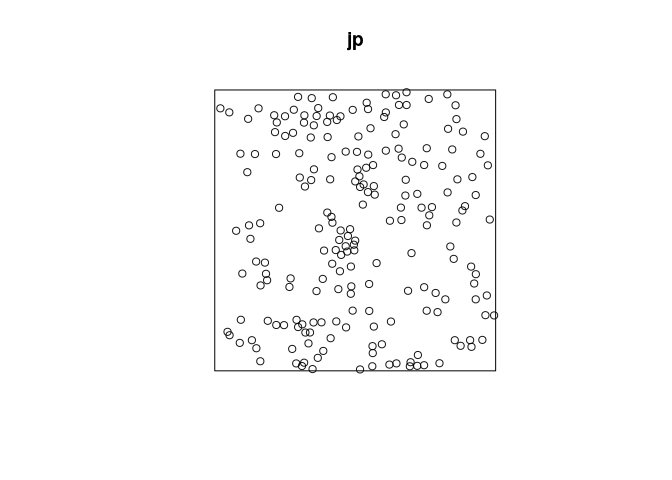
jp <- residualspaper$Fig1
plot(jp)
Gibbs models
Gibbs models were developed in theoretical physics to describe the
behaviour of molecular gases. A point pattern
represents a spatial
configuration of molecules. The probability of a particular
configuration
is
where is
the potential energy of the configuration, and
is a normalising
constant. In fact
is a probability density relative to the completely random
(homogeneous Poisson) point process.
To visualise this, imagine that we first generate an infinite “ensemble”
of realisations of the homogeneous Poisson process. Then each
realisation is either deleted or retained (in its entirety) depending on
its potential energy; a realisation
is retained with
probability
. Then what remains is an ensemble of realisations of the
Gibbs process.
The simplest example is the hard core process in which the points
represent the centres of discs of diameter
which cannot overlap. A
realisation
has
potential energy
if any pair of points in
lies closer than
distance
; otherwise it
has potential
. Now generate an infinite ensemble of realisations of the
Poisson process. Then delete any configuration which contains a pair of
points closer than distance
. The remaining realisations are an ensemble of realisations of the
hard core process.
Gibbs models can be fitted to point pattern data by maximising Besag’s
pseudolikelihood. This is performed by ppm.
ppm(cells~ 1, Hardcore())
## Stationary Hard core process
##
## First order term: beta = 282.7782
##
## Hard core distance: 0.08168525
##
## For standard errors, type coef(summary(x))
minnndist(cells)
## [1] 0.08363014
ppm(cells ~ 1, Strauss(0.1))
## Stationary Strauss process
##
## First order term: beta = 1138.136
##
## Interaction distance: 0.1
## Fitted interaction parameter gamma: 0.0050219
##
## Relevant coefficients:
## Interaction
## -5.29395
##
## For standard errors, type coef(summary(x))
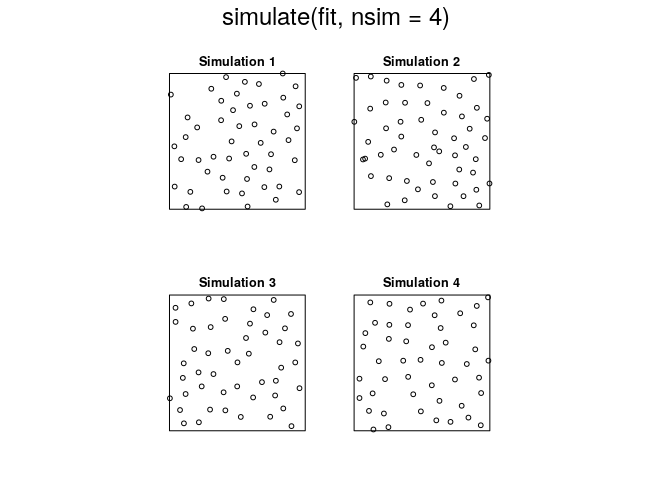
fit <- ppm(cells ~ 1, Strauss(0.1))
plot(simulate(fit, nsim=4))
## Generating 4 simulated patterns ...1, 2, 3, 4.
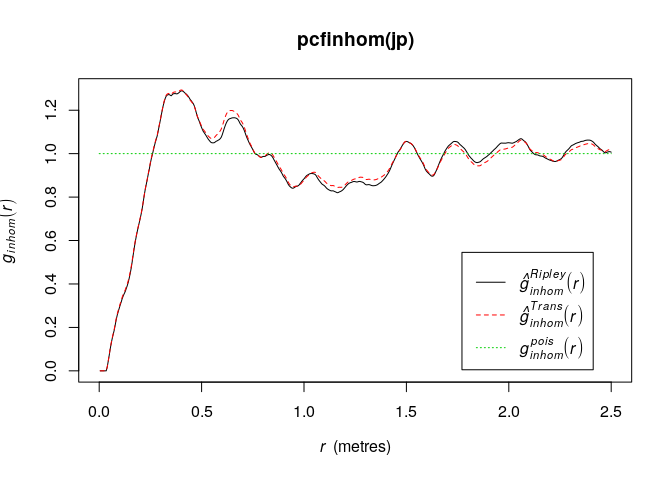
plot(pcfinhom(jp))
minnndist(jp)
## [1] 0.1410937
ppm(jp ~ x+y, Strauss(0.2))
## Nonstationary Strauss process
##
## Log trend: ~x + y
##
## Fitted trend coefficients:
## (Intercept) x y
## 0.679292879 0.006806174 0.024664271
##
## Interaction distance: 0.2
## Fitted interaction parameter gamma: 0.6367406
##
## Relevant coefficients:
## Interaction
## -0.451393
##
## For standard errors, type coef(summary(x))
ppm(jp ~ x+y, Strauss(0.5))
## Nonstationary Strauss process
##
## Log trend: ~x + y
##
## Fitted trend coefficients:
## (Intercept) x y
## 0.364642729 -0.004808391 0.033863194
##
## Interaction distance: 0.5
## Fitted interaction parameter gamma: 1.1799626
##
## Relevant coefficients:
## Interaction
## 0.1654827
##
## For standard errors, type coef(summary(x))
##
## *** Model is not valid ***
## *** Interaction parameters are outside valid range ***
Determinantal point process models
Determinantal point process models are a relatively new class of models with many attractive theoretical properties, but are not yet well understood for modelling purposes.
The likelihood is determined by the first and second moments (the
intensity and the pair correlation function). These models can be fitted
in spatstat using the function dppm.
dppm(jp ~ x+y, dppGauss)
## Inhomogeneous determinantal point process model
## Fitted to point pattern dataset 'jp'
## Fitted by minimum contrast
## Summary statistic: inhomogeneous K-function
##
## Log intensity: ~x + y
##
## Fitted trend coefficients:
## (Intercept) x y
## 0.591839808 0.014329205 0.009643885
##
## Fitted DPP model:
## Gaussian determinantal point process model
## The parameters are: lambda = an image, alpha = 0.06402, d = 2
## The parameter lambda specifies the intensity of the process.
## The parameter d specifies the dimension of the state space.
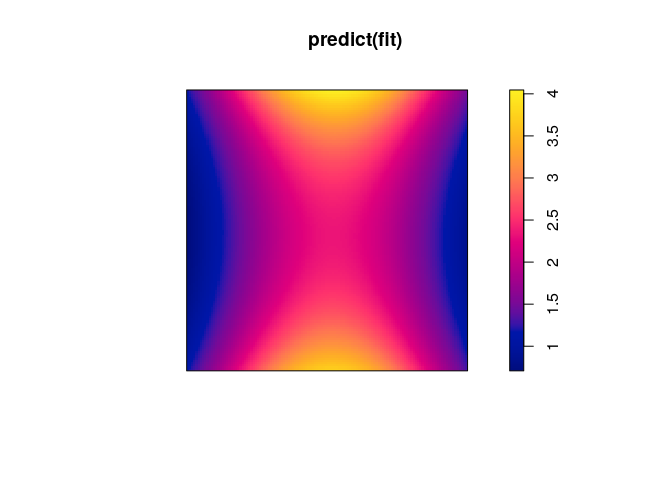
fit <- dppm(jp ~ polynom(x,y,2),
dppMatern,
statistic="pcf", statargs=list(stoyan=0.2))
## Warning: Some values of the empirical function 'pcf' were infinite or NA.
## Range of r values was reset to [0.0048828125, 2.5]
plot(predict(fit))
plot(simulate(fit))